
Si tuviéramos que definir en qué partes se compone un procesador, entonces lo más seguro es que en el 99% de las veces haríamos una línea divisoria entre dos partes, por un lado, las unidades de ejecución y todos los elementos necesarios para su funcionamiento y, por otro lado, la unidad de control, la cual se encarga de la captación, pero especialmente de la decodificación de cada instrucción, para ello tenemos que entender el ciclo de instrucción.
Para entender cómo funciona la unidad de control hemos de entender previamente cómo funciona el ciclo de cada instrucción, dónde primero se capta una instrucción de la memoria y es colocada en el registro de instrucción, el siguiente paso es la descodificación de la instrucción por parte de la unidad de control, la cual tras terminar su trabajo envía la instrucción a la unidad de ejecución que corresponda a esa instrucción.
¿Qué es la Unidad de Control de un procesador?
La unidad de control es una pieza indispensable que realiza la siguiente lista de trabajos de manera continua y transparente:
- Coordina el movimiento y el orden de los datos que se mueven dentro y fuera del procesador, así entre las diferentes subunidades que forman parte del mismo.
- Interpreta las instrucciones.
- Controla las diferentes ALU y unidades de ejecución del procesador.
- No solo se encarga de captar y decodificar las instrucciones, sino también de escribir los resultados en los registros, caches o en la dirección correspondiente de la RAM.
Por lo tanto, la unidad de control es el verdadero cerebro en la sombra dentro de la CPU, el que se encarga de gestionar que todas las piezas de la CPU reciban los datos correctos y ejecuten las instrucciones correctas en cada momento.
Las tareas de la unidad de control al tratar instrucciones
Los programas son una serie de instrucciones, las cuales se componen de una acción más un dato. Hay varios tipos de instrucciones y la unidad de control es la que se coloca antes de su resolución. Dado que las lee, interpreta y las envía a las unidades correspondientes. Por lo que se encarga de dos de las tres etapas del ciclo de instrucción de la CPU, como son la captación de datos e instrucciones, así como la decodificación de las mismas. Aunque el trabajo por el cual es más conocida es por la descodificación de las diferentes instrucciones que ha de ejecutar el procesador. Veamos a continuación cómo se realiza este proceso de manera sencilla.
Captación de instrucciones
La unidad de control se encarga de leer la información de la RAM de forma secuencial y ordenada para captar los datos y las instrucciones correspondientes. Para ello tiene una serie de mecanismos para realizar dicha tarea, los cuales son los siguientes:
- El contador de programa apunta a la siguiente dirección de memoria a la que apuntará el sistema de captación de la unidad de control. Sí, hay una instrucción de salto que envíe el programa a ejecutarse a otra parte de la memoria. En especial, para volver aprovechar el código, será el valor del contador de programa lo que cambiará.
- El registro de instrucción es la instrucción que opera en estos momentos el procesador. Si este se puede ejecutar desde la misma CPU, entonces no hará falta captar la instrucción desde memoria.
- Luego existen dos registros, uno de lectura y otro de escritura, que se encargan de enviar y recibir la información desde memoria.
A esto hay que añadirles elementos de coherencia de datos para evitar conflictos con la información, pero esto pertenece más bien al sistema de memoria caché, que si bien forma parte del procesador, es harina de otro costal y no pertenece a las tareas propias de la unidad de control.
La decodificación de instrucciones
Cada procesador tiene un conjunto de registros e instrucciones o ISA que podemos entender como el idioma del procesador, por lo que dependiendo de cada procesador un código binario puede significar una cosa u otra. Pero, en todos ellos, la instrucción siempre se divide en dos partes: el opcode y el dato. El opcode es el código de instrucción, a cada instrucción le corresponde siempre el mismo opcode dentro de una ISA
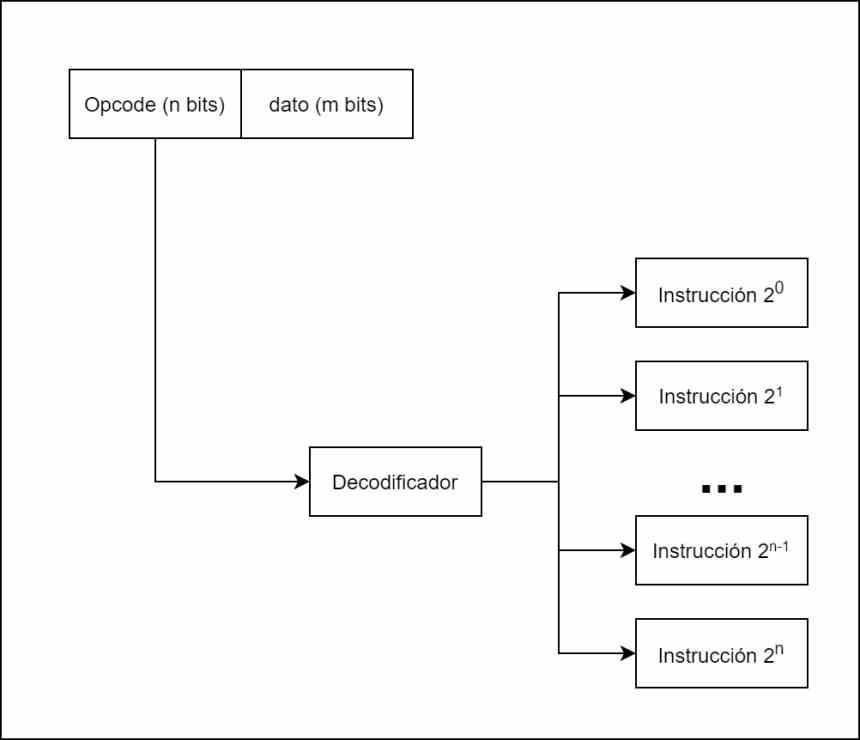
Suponed que tenemos un ordenador con un opcode de 3 bits, por lo que esto da 2^3 instrucciones, a través de un decodificador de n bits podemos generar una salida de 2n bits, en este caso 3 bits generan 8 caminos distintos, según el tipo de instrucción a ejecutar se tomará un camino u otro para solucionarla durante la etapa de ejecución de la instrucción.
Longitud de las instrucciones y velocidad de reloj
Se ha de tener en cuenta que cada instrucción se trata de forma distinta. No todas las instrucciones van a pasar por las mismas unidades y los mismos procesos. Por lo que el tiempo en ciclos de reloj, longitud del pipeline, de cada una es distinto. Es decir, el procesador no va a tardar lo mismo en ejecutar una instrucción de salto que una suma, por ejemplo, que otro, por lo que debéis tener en cuenta estos detalles para no fijar previamente un intervalo que luego podría no llevarse a cabo.
Eso sí, si la de suma tarda un ciclo y la de salto unos 10 ciclos, esto no significa una sea diez veces más lenta que la otra, ya que todo el proceso está segmentado por etapas. Y cuando una instrucción se encuentra en su primera etapa, entonces la anterior estará en la segunda. El problema viene con la contención, es decir, que se acabe creando un atasco por el hecho que una parte del procesador está demasiado tiempo ocupada con una única instrucción. Es por ello que la optimización en nuevos procesadores suele consistir en añadir nuevos caminos de datos y duplicidades para evitar dichos atascos.
Lo que se hace para aumentar la velocidad de reloj de los procesadores es aumentar el número de etapas. Esto se hace simplificándolas y afecta en especial a la unidad de control. ¿El truco? Cada etapa al durar menos tiempo supone una frecuencia más alta. ¿El problema? Cualquier colapso, como por ejemplo un salto de instrucción mal medido, pueden llevar a una parada general. De ahí a que las unidades de predicción de saltos sean tan complejas a día de hoy.
Tipos de unidades de control
Principalmente, tenemos dos tipos de unidades de control, la cableada y la microprogramada.
- Las unidades de control cableadas se utilizan en procesadores muy simples, ya que en ellas la tabla de registros e instrucciones no se puede cambiar al encontrarse todos los caminos de datos cableados previamente de manera fija, en una unidad de control cableada las instrucciones van a tener siempre el mismo rendimiento y no se van a poder añadir de nuevas ni optimizar su funcionamiento.
- En el caso de las unidades de control microprogramadas se utiliza un procesador que se encarga de realizar todas las funciones de la unidad de control, esto permite optimizar la forma en la que las instrucciones se van a ejecutar e incluso añadir nuevas instrucciones.
Debido a la complejidad de la unidad de control microprogramada, estas realizan la decodificación de las instrucciones de manera mucho más lenta, es por ello que según el tipo de instrucción se hace uso de un tipo de unidad de control o de otro a la hora de tratar cada una de las instrucciones.
Las unidades microprogramadas suelen estar compuestas por un microcontrolador dentro del procesador. Su principal ventaja es que el fabricante puede optimizar cómo se capta y decodifica cada instrucción o incluso hacer cambios si hay un error de seguridad en la forma de ejecutar ciertas instrucciones. Esto es clave para cuando hay amenazas graves que pueden aprovechar los puntos débiles de la CPU, como lo que ocurrió con Spectre y Meltdown.
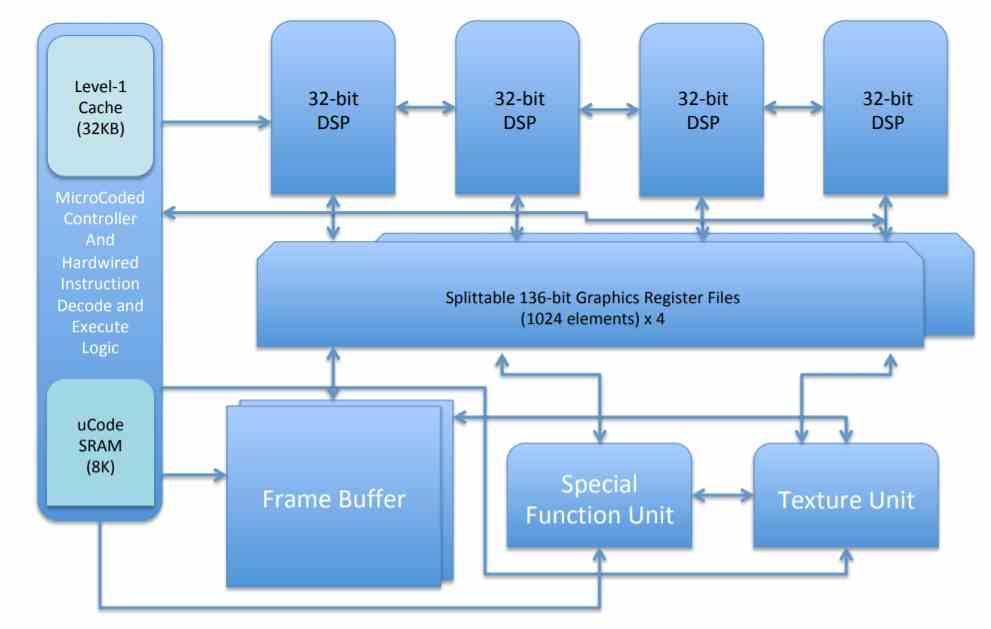
Las GPU también tienen una unidad de control
En realidad tiene dos distintas en su arquitectura, ya que el procesador de comandos es en sí misma una unidad de control, la cual se encarga de coger las listas de pantalla y de computación que escribe la CPU en una parte de la memoria, pero al contrario que con las unidades de control clásicas lo que hacen es asignar las tareas a las diferentes unidades shader y unidades de función fija. Se puede decir que el procesador de comandos es un enorme centro logístico, pero al contrario que una unidad de control convencional, solo se encarga de la captación de los datos.
Dentro de cada unidad shader existe un planificador, este es el encargado de traducir las instrucciones a la ISA de la GPU para que sus unidades de ejecución las puedan ejecutar. Pero su funcionamiento es distinto a la Unidad de Control de una CPU y esto es debido a que en una GPU no se ejecutan programas de manera normal. En una GPU cada «programa» es una manipulación concreta sobre un píxel o un vértice, por lo que no importa en qué orden se solucionen en cada una de las subetapas del pipeline 3D. Simplemente, si un hilo de ejecución no puede ser resuelto en el tiempo estipulado, entonces la unidad de control lo retrasa adelantando el anterior.
A partir de la arquitectura Ada en las RTX 40 de NVIDIA tenemos ya un intento de evolución hacia la ejecución fuera de orden, donde las instrucciones se ordenan según los recursos disponibles en cada momento para reordenarse al final. En todo caso, una GPU no ejecuta programas como una CPU, sino que cada «programa» hace referencia a un dato en concreto que queremos manipular. Por lo que pese a adaptar dicho funcionamiento de las CPU, sigue funcionando diferente.
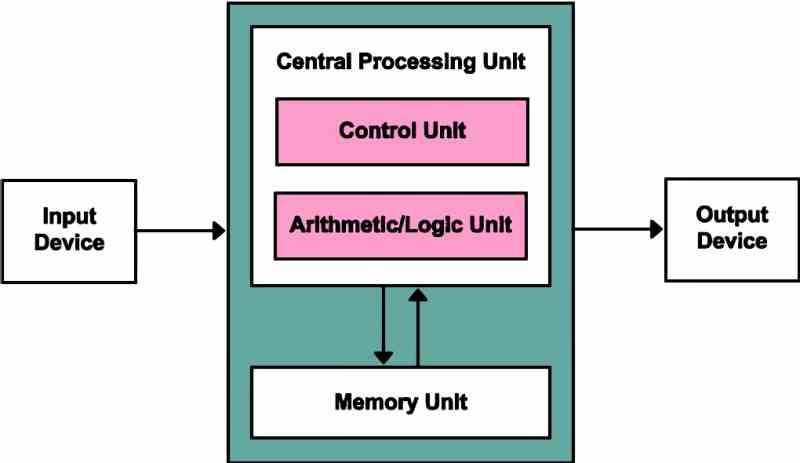
Arquitectura Von Neumann, cómo afecta a la Unidad de Control
Como bien sabemos, la arquitectura que vemos actualmente en los ordenadores modernos es denominada como Von Neumann, en la que se definía lógicamente la construcción de un ordenador, así como el funcionamiento del mismo. Es en dicha arquitectura en la que se especifica que la Unidad de Control debía estar incluida en lo que conocemos hoy en día como la CPU, al tratarse de una forma que permite una mayor velocidad de comunicación, tanto con los propios componentes internos como con los externos.
Y si hoy en día seguimos utilizando esta arquitectura es debido a que ha demostrado ser la mejor a la hora de gestionar la comunicación entre los distintos componentes y datos que circulan dentro de nuestro ordenador, ya que no es la única que se presentó. Existen varias arquitecturas adicionales que tuvieron que ser descartadas debido a que presentaban una serie de problemas bastante graves relacionados con la velocidad en la que se transmitían los datos, haciendo que no fuese nada óptimo implementarlas en un sistema informático.
De esta forma, se terminó adaptando la solución más óptima, que nos permite actualmente disfrutar de grandes velocidades de transmisión de datos entre la CPU y el resto de componentes, haciendo que a su vez, veamos cómo cada vez estas velocidades aumentan de forma significativa. Pero lo que debemos tener claro, es que aunque se siga utilizando por lo práctica que es, y aunque le queden muchos años, la arquitectura Von Neumann tiene una serie de problemas que pueden hacer que en un futuro no sea la más óptima, por lo que quien sabe si en un futuro podremos ver cómo se adopta una nueva forma de crear sistemas informáticos que afecte directamente a algunos de los componentes actuales como puede ser la unidad de control.